Datastrukturer och Algoritmer
Innehållsförteckning
Sök algoritmer
Linjär sökning
- Kollar varje element i en sekvensiell ordning
- Tidskomplexitet (Medelvärde): O(n)
- Bästa fall: O(1)
- Sämsta fall: O(n)
Binär sökning
- Kräver att listan är sorterad
- Delar listan i två delar och kollar om elementet finns i den vänstra eller högra delen
- Tidskomplexitet (Medelvärde): O(log n)
- Bästa fall: O(1)
- Sämsta fall: O(log n)
Sorteringsalgoritmer
Bubble sort
- Jämför två intilliggande (adjacent) element och byter plats om de är i fel ordning
- Tidskomplexitet (Medelvärde): O(n^2)
- Bästa fall: O(n)
- Sämsta fall: O(n^2)
- Utrymme: O(1)
void bubbleSort(int arr[], int n)
{
for (int i = 0; i < n - 1; i++) {
for (int j = 0; j < n - i - 1; j++) {
if (arr[j] > arr[j + 1]) {
// Swap arr[j] and arr[j+1]
int temp = arr[j];
arr[j] = arr[j + 1];
arr[j + 1] = temp;
}
}
}
}
Selection sort
- Hittar det minsta elementet i listan och byter plats med det första elementet
- Tidskomplexitet (Medelvärde): O(n^2)
- Bästa fall: O(n^2)
- Sämsta fall: O(n^2)
- Utrymme: O(1)
void selectionSort(int arr[], int n)
{
for (int i = 0; i < n - 1; i++) {
int indexOfMinimum = i;
for (int j = i + 1; j < n; j++)
if (arr[j] < arr[indexOfMinimum])
indexOfMinimum = j;
// Swap the found minimum element with the first element
if (indexOfMinimum != i) {
int temp = arr[indexOfMinimum];
arr[indexOfMinimum] = arr[i];
arr[i] = temp;
}
}
}
Insertion sort
- Delar listan i en sorterad och en osorterad del. Tar ett element från den osorterade delen och placerar det i den sorterade delen
- Tidskomplexitet (Medelvärde): O(n^2)
- Bästa fall: O(n)
- Sämsta fall: O(n^2)
- Utrymme: O(1)
void insertionSort(int arr[], int n)
{
for (int i = 1; i < n; i++) {
int key = arr[i];
int j = i - 1;
/* Move elements that are greater than key
to one position ahead of their current position */
while (j >= 0 && arr[j] > key) {
arr[j + 1] = arr[j];
j--;
}
arr[j + 1] = key;
}
}
Merge sort
- Delar listan i två delar och sorterar varje del separat. Sedan kombineras de sorterade delarna
- Tidskomplexitet (Medelvärde): O(n log n)
- Bästa fall: O(n log n)
- Sämsta fall: O(n log n)
- Utrymme: O(n)

void mergeSort(int array[], int n)
{
if (n < 2)
return; // Base case, can't split any more
int mid = n / 2;
int left[mid];
int right[n-mid];
for (int i = 0; i < mid; i++)
left[i] = array[i];
for (int i = mid; i < n; i++)
right[i - mid] = array[i];
mergeSort(left, mid);
mergeSort(right, n - mid);
merge(array, left, right, mid, n - mid);
}
Quick sort
- Väljer ett pivot element och delar listan i två delar. Elementen mindre än pivoten placeras till vänster och elementen större till höger
- Tidskomplexitet (Medelvärde): O(n log n)
- Bästa fall: O(n log n)
- Sämsta fall: O(n^2)
- Utrymme: O(log n)

Structs & Typedef
- Structs används för att skapa egna datatyper
- Typedef för att skapa egna datatyper
- Structs kan innehålla andra structs
- Structs kan innehålla variabler, räckor och pekare
// Typedef och struct
typedef struct {
int day;
int month;
int year;
} Date;
// Struct som innehpller struct
typedef struct {
char name[10];
Date date;
} Object;
// Variabl med struct
Date d1 = { 30, 10, 2024 };
// Ändra värden i struct
d1.month++;
// Array med struct
Date dateArray[100];
// Fylla array med struct
memset(dateArray, 0, sizeof(Date) * 100);
// Ändra värden i array med struct
dateArray[0] = (Date){30, 10, 2024};
// Ändra värden i array med struct
dateArray[0].year = 2024;
Rekursion
- En funktion som anropar sig själv
- Används för att lösa problem som kan delas upp i mindre delproblem
- Kan vara svårt att felsöka
- Kan leda till stackoverflow om det finns för många anrop
- Kan vara långsamt
/*
* n! = n * (n-1) * (n-2) * ... * 1
* 5! = 5 * 4 * 3 * 2 * 1 = 120
*/
int factorial(int n) {
if (n == 0) {
return 1;
}
return n * factorial(n - 1);
}
/*
* Fibonacci
* 0, 1, 1, 2, 3, 5, 8, 13, 21, 34, ...
*/
int fibonacci(int n) {
if (n == 0) {
return 0;
}
if (n == 1) {
return 1;
}
return fibonacci(n - 1) + fibonacci(n - 2);
}
/*
* Summan av alla tal från 1 till n
* 1 + 2 + 3 + 4 + 5 + ... + n
*/
int sum(int n) {
if (n == 0) {
return 0;
}
return n + sum(n - 1);
}
/*
* Binär sökning
*/
int binarySearch(int arr[], int n, int e)
{
return binarySearchRecursive(arr, 0, n - 1, e);
}
int binarySearchRecursive(int array[], int lowIndex, int highIndex, int e)
{
if (highIndex >= lowIndex) {
int midIndex = lowIndex + (highIndex - lowIndex) / 2;
if (array[midIndex] == e)
return midIndex; // Base case 1 - element found
if (array[midIndex] > e)
return binarySearchRecursive(array, lowIndex, midIndex - 1, e);
else
return binarySearchRecursive(array, midIndex + 1, highIndex, e);
}
return -1; // Base case 2 - element not found
}
Pekare (Pointers)
- En pekare är en variabel som innehåller en adress till en annan variabel
- Används för att referera till en variabel
- Används för att skicka pekare till funktioner
- Används för att allokera och frigöra minne
// Deklartion av pekare
int *pointer;
// Initialisering av pekare
int value = 10;
int *pointer = &value;
// Dereferensering av pekare
int value = 10;
int *pointer = &value;
int dereferencedValue = *pointer;
printf("%d\n", *pointer); // 10
// Två pekare till samma variabel
char value = 'A';
char *pointer1 = &value;
char *pointer2 = &value;
// Null pekare
int *pointer = NULL;
// Pekare som funktionsparametrar
void foo(int *pointer) {
*pointer = 20;
}
int value = 10;
foo(&value);
printf("%d\n", value); // 20
// Pekare och räckor
int values[5] = {1, 2, 3, 4, 5};
int *pointer = values;
printf("%d\n", *pointer); // 1
printf("%d\n", *(pointer + 1)); // 2
// Pekare och strukturer
typedef struct {
int day;
int month;
int year;
} Date;
Date date = { 30, 10, 2024 };
Date *pointer = &date;
printf("%d\n", pointer->day); // 30
printf("%d\n", (*pointer).month); // 10
// Funktioner som returnerar pekare
Date *getDate() {
Date date = { 30, 10, 2024 };
return &date;
}
Dynamisk minnesallokering
- Används för att allokera minne under körningstid
// Allokera minne
int size = 10;
int *arrayPointer = malloc(sizeof(int) * size);
// Omallokera minne
arrayPointer = realloc(arrayPointer, sizeof(int) * (size*2));
/*
* Minnesläcka kan hända om man använder malloc flera gånger på samma pekare
*/
// Frigör minne
free(arrayPointer);
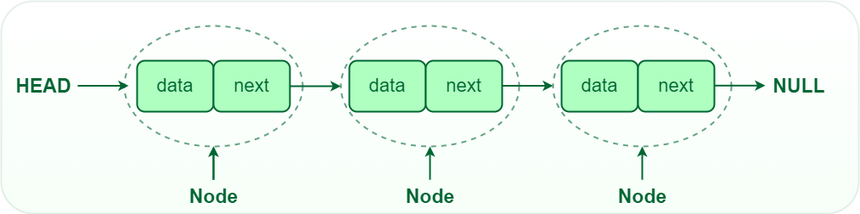
Länkade listor
- En länkad lista består av noder som innehåller data och en pekare till nästa nod
- En dubbel länkad lista innehåller även en pekare till föregående nod
- En cirkulär länkad lista har en pekare från sista noden till första noden
- En länkad lista behöver alltid en head nod
- Tidskomplexitet (Medelvärde): O(n)
typedef struct {
int data;
char data2;
} Data;
// Enkel länkad lista
typedef struct {
Data data;
// Pekare till nästa nod
struct Node *next;
} Node;
// Skapa en nod
Node *createNode(int data) {
Node *node = malloc(sizeof(Node));
if (node == NULL) {
return NULL;
}
node->data = data;
node->next = NULL;
return node;
}
Data data = { 10, 'A' };
// Skapa en nod. Länkad lista behöver alltid en head nod
Node *head = createNode(&data);
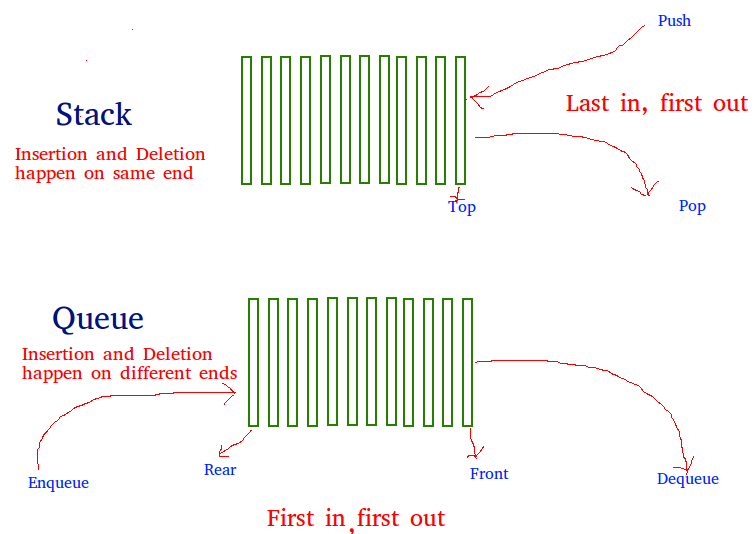
Stackar och köer
- Stack (LIFO - Last In First Out) Som betyder att det sista elementet som sätts in är det första som tas ut
- Kö / Queue (FIFO - First In First Out) Som betyder att det första elementet som sätts in är det första som tas ut
typedef struct {
int data;
char data2;
} Data;
// Stack (LIFO)
typedef struct {
Data data;
struct Stack *next;
} Stack;
// Koe (FIFO)
typedef struct {
Data data;
Queue *next;
} Queue;
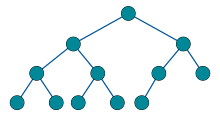
Binära träd
- Ett binärt träd är en datastruktur som består av noder som innehåller data och pekare till vänster och höger nod
- Tidskomplexitet (Medelvärde): O(n log n)
// Binärt träd nod
typedef struct {
int data;
struct Node *left;
struct Node *right;
} Node;
// Skapa en nod
Node *createNode(int data) {
Node *node = malloc(sizeof(Node));
if (node == NULL) {
return NULL;
}
node->data = data;
node->left = NULL;
node->right = NULL;
return node;
}
// Sätt in en nod i trädet
void insert(Node **root, int data) {
if (*root == NULL) {
*root = createNode(data);
return;
}
if (data < (*root)->data) {
insert(&(*root)->left, data);
} else {
insert(&(*root)->right, data);
}
}
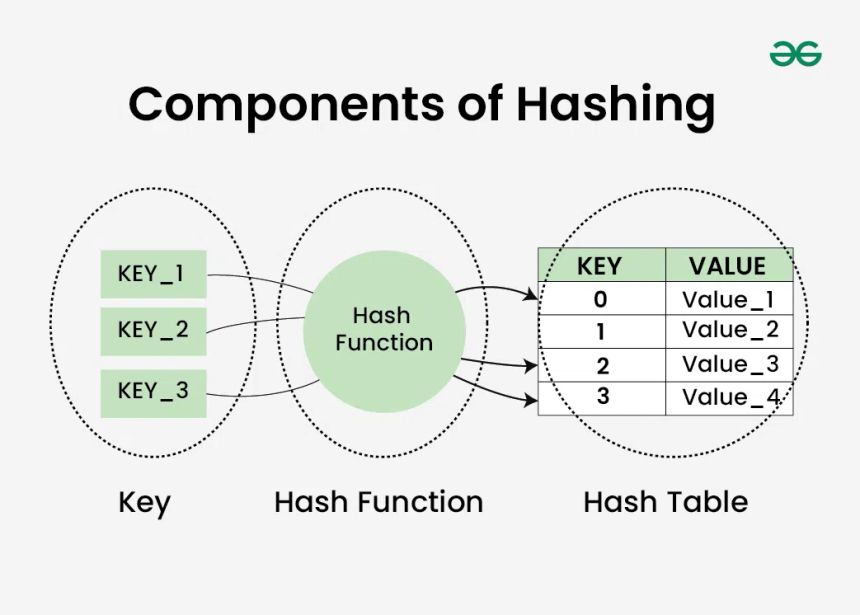
Hash tabeller
- En hash tabell är en datastruktur som används för att lagra nyckel-värde par
- En hash funktion används för att beräkna index för varje nyckel
- En hash tabell används för att hitta data med hjalp av nyckel
- Kollisioner kan lösas med hjälp av linjär sökning eller länkad lista
- Tidskomplexitet (Medelvärde): O(1)
// Hash tabell element
typedef struct {
int key;
int data;
} HashElement;
// Hash tabell
#define TABLE_SIZE 100
HashElement *hashTable[TABLE_SIZE];
// Hash funktion
int hashFunction(int key) {
return key % TABLE_SIZE;
}
// Sätt in element i hash tabell
void insert(int key, int data) {
int index = hashFunction(key);
hashTable[index] = malloc(sizeof(HashElement));
hashTable[index]->key = key;
hashTable[index]->data = data;
}
// Sök efter element i hash tabell
HashElement *search(int key) {
int index = hashFunction(key);
return hashTable[index];
}